This project aims to use VR and AI to develop more effective digital tools for understanding commuting experiences.
Brief
Traditional methods for evaluating commuter experiences, such as surveys and observations, are time-consuming and may disrupt participants, affecting data quality. The project consists of 3 major parts - DataProc, VRCS and CRMA.
DataProc
The Data Processing (DataProc) tool is a research artifact in the form of a graphical tool that investigates how to best process LiDAR-based terrestrial scans and photogrammetry-based aerial scans that capture real-life streetscape data to be translated for use in VR and mobile environments for VRCS and CRMA respectively.
There are many research problems that the team worked on the “translation” process, which includes 3D semantic segmentation for 3D scene understanding and usability design in our custom tool interface to manipulate these massive point clouds (file size of ~8GB per 200m² tile).
VRCS
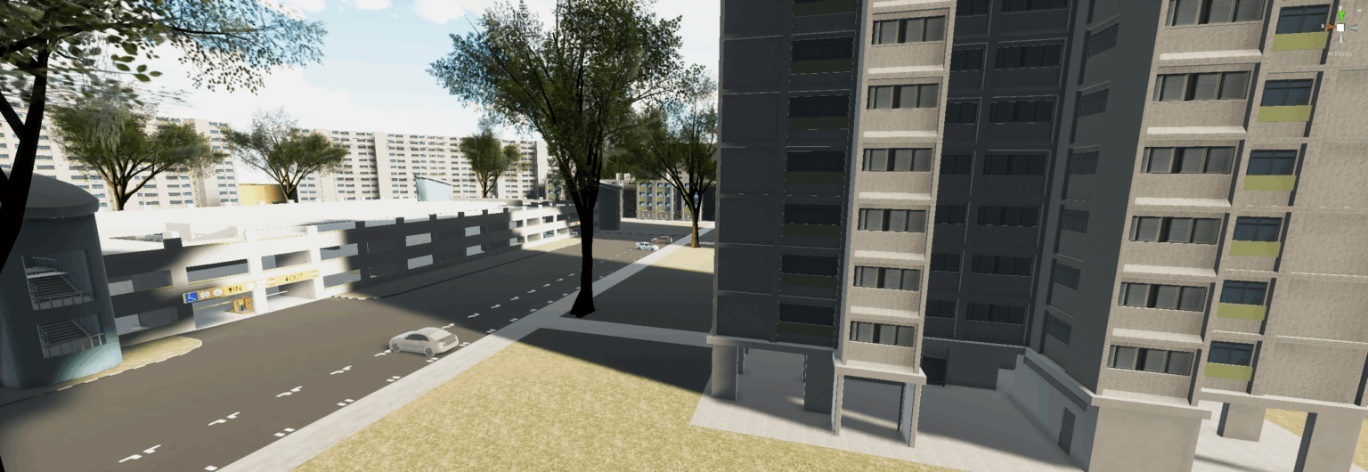
The Virtual Reality Commuting Simulator (VRCS) is a research artefact that helps the team understand how to design a VR tool for evaluating commuter experiences. It addresses data quality and cost challenges associated with physical surveys and field observations, while providing a safer, more controlled environment to obtain nuanced commuter responses.
Key research areas include interaction design for infinite walking in VR, VR UI design, and procedural generation of VR assets from point cloud data processed through DataProc.
CRMA
The Commuter Routing Mobile App (CRMA) is a research tool designed to explore whether a highly localised routing app with personalised features, such as barrier-free routes that consider weather, can offer new benefits for Singaporean commuters.
The research investigates suitable machine learning architectures for personalised routing and whether the app can encourage commuters to provide useful data for transport planners.
![[FA] SIT One SITizen Alumni Initiative_Web banner_1244px x 688px.jpg](/sites/default/files/2024-12/%5BFA%5D%20%20SIT%20One%20SITizen%20Alumni%20Initiative_Web%20banner_1244px%20x%20688px.jpg)